
About Me
Hi, my name is Anran Zhang. I am a PhD student in Mobile Robotics Lab at TUM/ETH Zurich with Prof. Stefan Leutenegger, Dr. Helen Oleynikova, Prof. Daniel Cremers, working on mobile manipulation.
I grow with different robot systems and research projects. I interned in Realtime System Group at Agile Robots under supervision Dr. Eugen Nuss and KI. Fabrik under supervision of Prof. Sami Haddadin, working on realtime control of robotic systems.
I obtained my master's degree from TUM with high distinction in Mechatronics and Robotics. Previously, I earned my bachelor's degree in Automotive Engineering from Jilin University, where I had a great time in Gspeed Racing Team.
Selected Publications(* and † indicate equal first authorship or equal last authorship.) |
|
|
Robot Self-Improvement via Human-Video Dynamics Models
Hanzhi Chen*, Anran Zhang*, Simon Schaefer, Kejia Chen, Shi Chen, Daniel Cremers, Oier Mees†, Stefan Leutenegger† arXiv 2026 Project page / Paper / Video / Code We show that human-video priors are useful not only for policy initialization, but also for driving autonomous robot self-improvement. |
|
Actron3D: Learning Actionable Neural Functions from Videos for Transferable Robotic Manipulation
Anran Zhang*, Hanzhi Chen*, Yannick Burkhardt, Yao Zhong, Johannes Betz, Helen Oleynikova, Stefan Leutenegger ICRA 2026 Project page / Paper / Video / Code We present Actron3D, a framework that enables robots to acquire transferable 6-DoF manipulation skills from just a few monocular, uncalibrated, RGB-only human videos via Neural Affordance Functions. |
|
VidBot: Learning Generalizable 3D Actions from In-the-Wild 2D Human Videos for Zero-Shot Robotic Manipulation
Hanzhi Chen, Boyang Sun, Anran Zhang, Marc Pollefeys, Stefan Leutenegger CVPR 2025 Project page / Paper / Video / Code We present a framework to learn 3D affordance from in-the-wild human videos, enabling zero-shot robotic manipulation in real-world environments. |
|
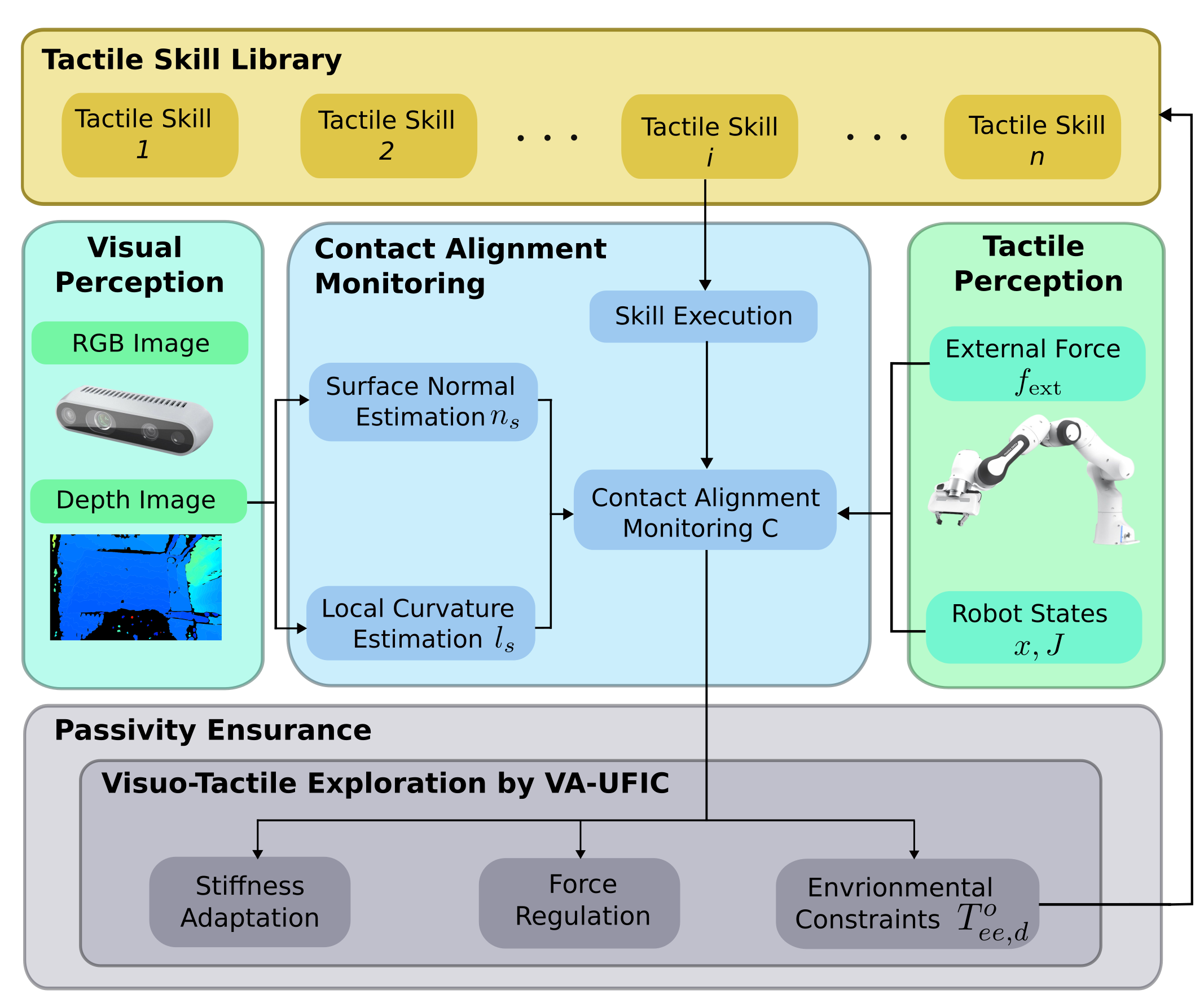
Visuo Tactile Exploration of Unknown Rigid 3D Curvatures by VA UFIC
Kübra Karacan, Anran Zhang, Hamid Sadeghian, Fan Wu, Sami Haddadin IROS 2024 Paper / Video We propose Vision-Augmented Unified Force-Impedance Control (VA-UFIC), aiming at intuitive visuotactile exploration of unknown 3D curvatures, with realtime adaptation. |
Other Projects |

|
Kinematic Calibration
Internship Project @ Agile Robots Calibration industrial robot arm according to Standard ISO 9283, gather data from laser tracker and robot, evaluate the repeatablity performance, and optimize the kinematic model of the robot. |

|
Cyber Physical System Lab
Course Project Deployed control algorithms (Model Predictive Control) on scaled F10th racecar in simulation and on race track. It was fun! |
|
|
|
Templates using Leonid Keselman's Jekyll fork. |